W. G. Harter
Basic ideas of classical velocity, momentum, and kinetic energy (KE) are reviewed using geometry and super-ball collision experiments involving two different masses. The idea of potential energy (PE) and force is introduced by defining PE as the KE of “idler” balls that provide force fields for others. The two most famous PE functions, those of Coulomb and of a harmonic oscillator or linear (Hooke-Law) force are introduced. Elliptic orbit geometry in the latter serves to introduce quadratic forms. This helps derive more advanced ideas of Lagrange, Hamilton, and Poincare and clarifies basic axioms of classical mechanics. A review of complex analysis of functions and fields sets the stage for use in later Units.
| Page in Textbook | |
|---|---|
| Chapter 1. Collision velocity change and slope geometry | 21 |
| Idealization and model building | 21 |
| Review of slope geometry, sin, sec, tan and complimentary trig functions | 23 |
| Slope angles, ratios, and areas | 23 |
| Right-handed Cartesian coordinates | 25 |
| Change and delta variables | 26 |
| Slope and delta ratios | 26 |
| Exercises for study of slope and trigonometry | 27 |
| Arc functions | 29 |
| Know your calculator and ATAN, too! (atan2(y,x)) | 31 |
| Chapter 2. Velocity and momentum | 33 |
| Momentum exchange: a zero-sum game | 33 |
| Deducing (perfect?) conservation from (ideal?) symmetry | 35 |
| Galilean time-reversal symmetry | 35 |
| Galilean relativity and spacetime symmetry | 37 |
| Geometry of Balance: Center of Momentum (COM) and Center of Gravity (COG) | 38 |
| Chapter 3. Velocity and energy | 41 |
| Time symmetry and energy conservation | 41 |
| Time symmetry | 41 |
| Kinetic Energy conservation | 41 |
| Geometry of kinetic energy ellipse and momentum line | 42 |
| Introducing vector and tensor geometry of momentum-energy conservation | 44 |
| Momentum vs. energy (Bang! for the $buck$!): Standard (mks) units | 45 |
| Quick review of kinetic relations and formulas | 46 |
| Relations of energy W and space x | 46 |
| Relations of momentum P and time t | 46 |
| Exercise 1.3.3. Quick construction of Energy ellipses | 50 |
| Chapter 4. Dynamics and geometry of successive collisions | 51 |
| Independent collision models (ICM) | 53 |
| Extreme and optimal cases | 54 |
| Integrating velocity plots to find position | 55 |
| Help! I’m trapped in a triangle | 61 |
| Two balls in 1D vs. one ball in 2D | 61 |
| Angle of incidence=Angle of reflection (or NOT) | 61 |
| Bang force | 61 |
| Kinematics versus Dynamics | 62 |
| Dynos and Kinos: Classical vs. quantum theory | 62 |
| Chapter 5 Multiple collisions and operator analysis | 65 |
| Doing collisions with matrix products | 65 |
| Rotating in velocity space: Ticking around the clock | 67 |
| Statistical mechanics: Average energy | 68 |
| Bonus: Rational right triangles | 69 |
| Reflections about rotations: It’s all done with mirrors | 69 |
| Through the clothing store looking glass | 70 |
| Chapter 6 Introducing Force, Potential Energy, and Action | 75 |
| MBM force fields and potentials | 75 |
| Isothermal model force laws | 76 |
| Adiabatic model force laws | 77 |
| Conservative forces and potential energy functions | 77 |
| Is it +or-? Physicist vs. mathematician and the 3rd law | 77 |
| Isothermal “Robin Hood”and “Fed rules” | 78 |
| Oscillator force field and potential | 79 |
| The simplest force field F=const. | 81 |
| Introducing Action. It’s conserved (sort of) | 81 |
| Monster mass M1 and Galilean symmetry (It’s deja vu all over, again.) | 82 |
| Chapter 7 Interaction Forces and Potentials in Collisions | 87 |
| Geometry of superball force law | 87 |
| Dynamics of superball force: The Project-Ball story | 88 |
| The trip to Whammo | 88 |
| Eureka! Polka-dots save Project Ball | 88 |
| The “polka-dot” potential | 89 |
| Force geometry: Work and impulse vs. energy and momentum | 91 |
| Kiddy-pool versus trampoline | 91 |
| Linear force law, again (But, with constant gravity, too) | 93 |
| Why super-elastic bounce? | 95 |
| RumpCo versus Crap Corp | 95 |
| Seatbelts and buckboards | 97 |
| Friction and all that “dirty” stuff | 98 |
| Chapter 8 N-Body Collisions: Two’s company but three’s a crowd | 101 |
| The X3: Three-ball towers | 101 |
| Geometric properties of N-stage collisions | 103 |
| Supernovae super-duper-elastic bounce (SSDEB) | 103 |
| Newton’s balls | 103 |
| Friction, again: Inelastic energy-momentum quadratic equations | 105 |
| Geometric derivation of elastic and inelastic energy ellipses | 107 |
| Ka-Runch-Ka-Runch-Ka-Runch-Ka-Runch-...:Inelastic pile-ups | 109 |
| Ka-pow-Ka-pow-Ka-pow-Ka-pow-...:Rocket science | 111 |
| Chapter 9 Geometry and physics of common potential fields | 115 |
| Geometric multiplication and power sequences | 115 |
| Parabolic geometry | 117 |
| Coulomb and oscillator force fields | 119 |
| Tunneling to Australia: Earth gravity inside and out | 121 |
| To catch a falling neutron starlet | 123 |
| Starlet escapes! (In 3 equal steps) | 125 |
| No escape: A black-hole Earth! | 125 |
| Oscillator phasor plots and elliptic orbits | 126 |
| Chapter 10 Calculus of exponentials, logarithms, and complex fields | 131 |
| The story of e : A tale of great interest | 132 |
| Derivatives, rates, and rate equations | 134 |
| The binomial expansion | 135 |
| General power series approximations | 137 |
| Sine-wave power series | 139 |
| Euler’s theorem and relations | 141 |
| Wages of imaginary interest: Phasor oscillation dynamics | 142 |
| What Good Are Complex Exponentials? | 143 |
| Complex numbers provide "automatic trigonometry" | 143 |
| Complex exponentials Ae-i_t tracks position and velocity using Phasor Clock | 143 |
| Complex numbers add like vectors | 143 |
| Complex products provide 2D rotation operations | 144 |
| Complex products set initial values | 144 |
| Complex products provide 2D “dot”(•) and “cross”(x) products | 144 |
| Complex deriviative contains “divergence”(_•F) and “curl”( _xF) of 2D vector field | 145 |
| Complex potential _ contains “scalar”( F= __) and “vector”( F=_xA) potentials | 145 |
| Complex integrals ∫ f(z)dz count “flux”( ∫Fxdr) and “vorticity”( ∫F•dr) | 146 |
| Complex derivatives give 2D multipole fields | 151 |
| Complex power series are 2D multipole expansions | 152 |
| Complex 1/z gives stereographic projection | 154 |
| Cauchy integrals | 156 |
| Chapter 11 Oscillation, Rotation, and Angular Momentum | 159 |
| Keplerian construction of elliptic oscillator orbits | 159 |
| Elementary ellipse construction | 159 |
| Orbiting versus rotating: Centripetal versus centrifugal | 161 |
| Circular curvature | 162 |
| More inertial forces: Coriolis and tidal forces | 163 |
| Vector analysis and geometry of elliptic oscillator orbit | 165 |
| Matrix operations and dual quadratic forms | 166 |
| Slope multiplication and eigenvectors | 167 |
| Geometric slope series | 168 |
| Angular momentum and Kepler’s law | 170 |
| Flight of a stick: Introducing geometry of cycloids | 170 |
| Center of percussion, radius of gyration, and “sweet-spot” | 171 |
| Chapter 12 Velocity vs momentum functions: Lagrange vs Hamilton | 175 |
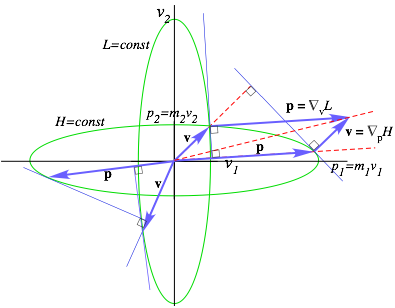
| Relating energy ellipses in velocity and momentum space | 175 |
| Lagrangian, Estrangian, and Hamiltonian functions | 175 |
| L, E, and H ellipse geometry | 176 |
| Legendre contact transformations | 178 |
| Extreme geometry of contact transformations | 179 |
| General contact transformation geometry | 180 |
| The Equations of the Classical Universe (Lagrange, Hamilton, and others) | 183 |
| Lagrange’s version of Newt-II (f=Ma) | 185 |
| Hamilton’s version of Newt-II (f=Ma) | 188 |
| Variational calculus of Lagrangian mechanics | 189 |
| Poincare’s invariant, quantum phase, and action | 190 |
| Huygen's principle: "Proof" of classical axioms and path integrals | 190 |
| Bohr quantization | 193 |
| Appendix 1A Vector product geometry and Levi-Civita _ijk | 1 |
| Determinants and triple products | 2 |
| Operator products | 3 |
| Unit 1 References | 1 |
-Unit 1 - Review of Velocity, Momentum, Energy, and Fields
Perhaps the most common fundamental modern physics experiment is to collide particles against each other. That’s all they do at LHC (Large Hadron Collider) where protons are rammed head-on at speeds above 0.999999c at several TeV (Trillion or Tera-electron Volts). Electron microscopes and laser spectral experiments are just particle crashes, too, involving molecules, atoms, electrons, and photons at intermediate energies ranging from keV (Thousand or kilo-eV) to about 1eV for one green light photon down to ultra-low energies measured in neV (Billionths or nano-eV) for collisions in BEC experiments. We begin studying momentum and energy by making classical analogies to common (I hope not for us!) freeway car crashes.
Chapter 1. Collision velocity change and slope geometry
Ka-runch! A 4-ton SUV going 60mph rear-ends a 1-ton VW going 10mph. See Fig. 1.1a. The SUV driver was busy texting a cell-phone and not watching the road. Both vehicles abruptly change speeds as seen in Fig. 1.1b-c. In order to calculate the speed changes we need to decide whether our collision is a “ka-runch!” where the cars get welded into a single mass as in the top right of Fig. 1.1(c) or a “ka-bong!” where they bounce off with no damage (very unlikely) as in center Fig. 1.1b or else quite likely intermediate “ka-whump!” collisions to be detailed later on. The technical term for ka-runch is a totally inelastic collision. We’ll study it first followed by ka-bong, or technically a perfectly elastic collision, and finally the generic range of ka-whumps or inelastic collisions that lie between the first two ideals or extremes.
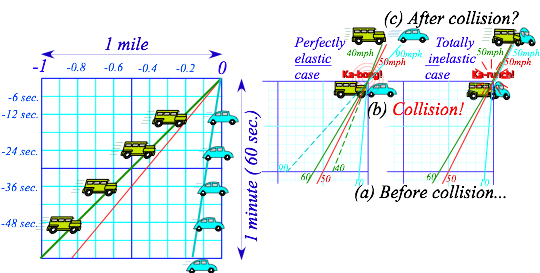
Fig. 1.1 Time vs. space graphs of (a) SUV (going 60mph) and VW (going10mph), (b) collision, and (c) possible outcomes of two extreme cases: the inelastic “ka-runch!” and perfectly elastic “ka-bong!”
This text uses of geometry to get quicker results and expose logic. First, let’s review some conventions regarding slope on graphs. Our first graph (Fig. 1.1 or Fig. 1.2a below) is a time vs. distance plot and speed is slope-from-vertical as favored in relativity theory and by Einstein’s math teacher, Herman Minkowski. In contrast, Newtonian calculus favors distance vs. time plots like Fig. 1.2b and speed is slope-from-horizontal. Both our plots are scaled so a 1:1 ratio (45°slope=1/1) represents 60 mph = 1 mile/min. in Fig. 1.2a or 1 min./mile in Fig. 1.2b. Plot (a) compliments (b). One becomes the other by doing a mirror-reflection across the 45° diagonal (1:1)-“SUV-line” that is the same in (a) and (b). Plot (a) is best for car motion since cars go horizontally. For (b) one might ask, “Do cars climb walls?!” (See review of slope.)
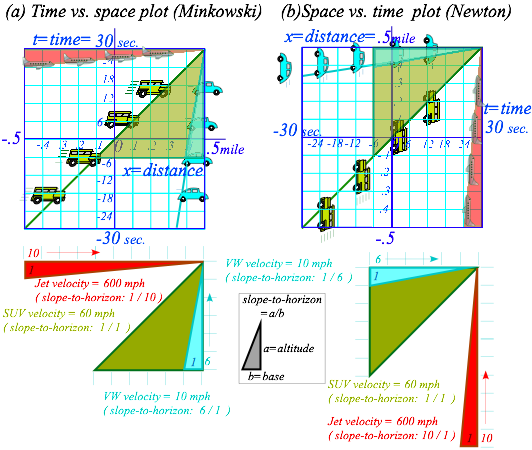
Fig. 1.2 Complimentary plots (a) Minkowski time vs. space plots vs. (b) Newton’s space vs. time plots.
Before
proceeding with car-crash analysis, it is required we give full disclosure of
an important part of physics that concerns its idealization and model building.
Idealization and model building
Landscape 1.1 below applies explicitly to this Unit 1 but implicitly to this entire text and to all other physics texts. Scientific theory always requires an idealized model in which to develop its axioms and logic for its qualitative and quantitative thought (Gadaken) experiments. It’s an ancient tradition for physics.
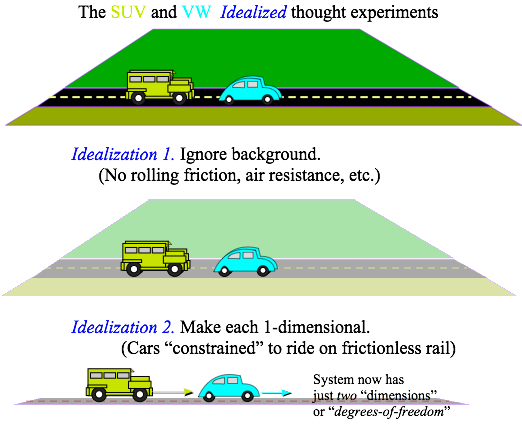
Landscape 1.1 Idealized model for collision model and thought experiments
Here is where we play “Let’s pretend.” We ignore most of the reality of the open road, most notably friction of the road surface-tire interface and air resistance. Also, we restrict the number of independent variables or dimensions. They are also called degrees of freedom. Here there is only one dimension for each car or two dimensions in all. It is as though we have re-framed the car crash as a perfect air-track with two bumper-cars floating on it. Models like this one are meant to be expanded. The next Landscape 1.2 begins this process by listing the most important classical degrees of freedoms for AMO physics.
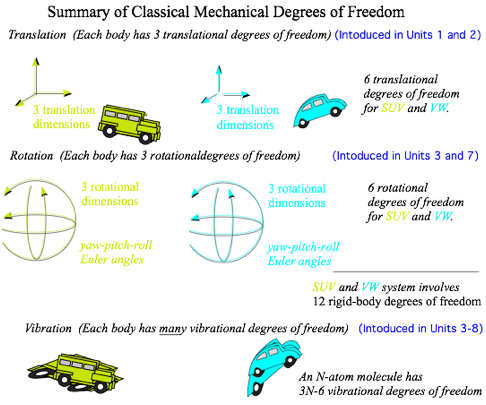
Landscape 1.2 Some idealized classical model degrees of freedom
Models of molecules, atoms, and even nuclei begin with classical models having 3 translational, 3 rotational, and N vibrational degrees of freedom for every nucleon or nucleus and every electron in them.
Classical translation-rotation-vibration degrees of freedom may be expressed in coordinates that are more convenient than the Cartesian coordinates (CC). These are known as Generalized Curvilinear Coordinates (GCC) and are essential in general relativity theory. A simple example, polar coordinates, are used to introduce GCC in Chapter 12. Other examples of Orthogonal Curvilinear COordinates (OCC) are derived in Chapter 10 in connection with complex field coordinates.
In quantum mechanics, we find for each classical degree of freedom an infinite number (∞) of degrees of freedom. In fact, it’s two infinities (2∞) for each since they are complex dimensions.
Now if you know everything about slope, you may proceed to Ch. 2 for more news on the car crash.
But, there are some tricky and subtle things in this Review of slope... section that follows. These
could bite you later! So it is definitely recommended reading. See if you can
do exercises without peeking at answers.
Review of slope
geometry, sin, sec, tan and complimentary trig functions
Slope is defined as the ratio Äy/Äx of vertical altitude Äy per horizontal base Äx. This equals velocity v=Äx/Ät for a horizontal time-t-axis and vertical space-x-axis like Fig. 1.2b. So horizontal x-axis and vertical time-t-axis of Fig. 1.2a has slope=Ät/Äx=1/v inverse to Fig. 1.2b slope. The lowest slope=1/10 in Fig. 1.2a belongs to jet velocity v=600mph that is the highest slope=10/1 in Fig. 1.2b, and a low VW velocity of v=10mph has a steep triangle of slope=6/1 in Fig. 1.2a but in Fig. 1.2b that VW line is a low slope=1/6.
Each unit graph square in Fig. 1.2a has a
horizontal
scale factor of sx=0.1mile(per square) and a vertical scale
factor of sy=6sec.(per square) and vice versa for Fig. 1.2b. If you multiply scale sx by factor fx and sy by fy then each graph slope ![]() =(ny
vert. squares)/(nx
horiz. squares) changes to (fx/fy)
=(ny
vert. squares)/(nx
horiz. squares) changes to (fx/fy)![]() .
.
We do rescaling of dimensions to change
units. For example, changing miles to feet in Fig. 1.2a uses factor fx =5,280 ft. per mile (or ![]() ) and changing minutes to seconds uses fy =60
) and changing minutes to seconds uses fy =60![]() . The scale ratio (fx/fy) is 88, that is, 60mph equals 88
. The scale ratio (fx/fy) is 88, that is, 60mph equals 88 ![]() . SUV slope of 1 in Fig. 1.2b is 88 in a ft. vs. sec. plot. That’s too high to plot 60mph accurately but a ft. vs. sec. or ft. vs. min. plot will be more appropriate for
parking lot speeds.
. SUV slope of 1 in Fig. 1.2b is 88 in a ft. vs. sec. plot. That’s too high to plot 60mph accurately but a ft. vs. sec. or ft. vs. min. plot will be more appropriate for
parking lot speeds.
Slope angles, ratios, and areas
Most of us learn to measure slope by degrees(°) of a slope angle ó. Greek “s” or sigma ó stands for sector slope. (We also use theta (è) or phi (ö).) But, degrees are an arbitrary choice of 180° per (1/2)-turn or 360° per full turn. A better unit is 1 radian=180/π~57.3°. A ó=1radian-sector on unit circle (r=1) (Fig. 1.3a) has unit arc-length (l=ó·r=1) and unit sector area (A=ó·r2=1) based on π=3.14159…(pi), not an arbitrary number.
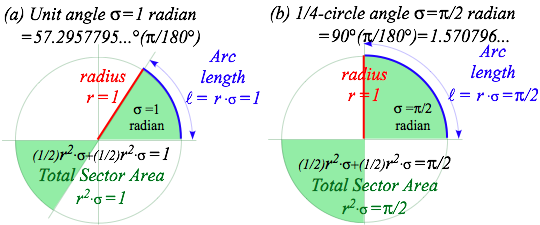
Fig. 1.3 (a) Definition of unit angle (ó =1) on unit circle (r =1) (b) A quarter turn sweeps half the area.
The trick here is that the sector slope line sweeps out two pieces of the pie to make a whole pie or area pi=π if angle ó is π or 180°. The 1/4-circle angle ó=ð/2 in Fig. 1.3b sweeps area πr2/2=π/2 of half a pie. It may not be how you serve pie, but it’s how mathematicians serve π. (There (or their) pie (or pi) are squared!)
Actual slope is the tangent of angle ó written tanó and so called since it is the length
of a line tangent to or “touching” a unit circle from angle ó to x-axis. (See Fig. 1.4b.) Another
triangular ratio is the sine or sinó that stands
(I’m
guessing) for “slope
over incline.” The tangent in
Fig. 1.4 is an a:b ratio (![]() ), but the sine is an a:r ratio (
), but the sine is an a:r ratio (![]() ) that civil
engineers use to “grade” roads.
) that civil
engineers use to “grade” roads.
percent-grade=100·(altitude Äy gained)/(distance Är traveled) =100 sin ó
High grades are good in school but bad for roads. An interstate highway would “flunk” anywhere its grade was above 5%. This changed in 2001 with the Bush administration’s “No Road Left Behind” policy.
Each triangle ratio switches places with
its codependent
ratio if you switch x-and-y-axes (or altitude-and-base) or switch
Fig. 1.2a Minkowski plots to Fig. 1.2b Newton plots. For example, a cotangent ratio ![]() is codependent
to tan ó, and cosine ratio
is codependent
to tan ó, and cosine ratio ![]() is
codependent to sin
ó.
is
codependent to sin
ó.
In comparing (a) vs. (b) in Fig. 1.2 we saw that a slope
(like 6/1) in (a) is inverse slope (1/6) in (b). (That was for the 10mph VW.) In other words, any slope ![]() in (a) becomes
in (a) becomes ![]() in (b).
Also any slope angle ó in (a) becomes a compliment
in (b).
Also any slope angle ó in (a) becomes a compliment![]() to angle ó in (b). (See Fig. 1.4a.)
to angle ó in (b). (See Fig. 1.4a.)
From the two preceding paragraphs we deduce that any ratio like sinó or tanó for angle ó must equal its co-ratio for the compliment óc=ð/2−ó, and vice versa.
![]()
Two
other ratios use secant (or “sword-like”)
lines that pierce the circle in Fig. 1.4b. The horizontal line is a secant ratio ![]() and its
co-ratio is a cosecant
ratio
and its
co-ratio is a cosecant
ratio ![]() .
.
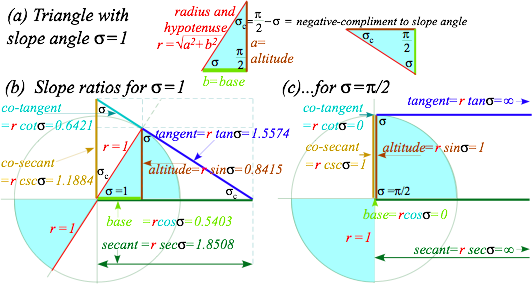
Fig. 1.4 (a) Right triangle geometry for ó=1 slope (b) Triangle ratios for ó=1 and (c) ó=ð/2.
Right-handed Cartesian coordinates
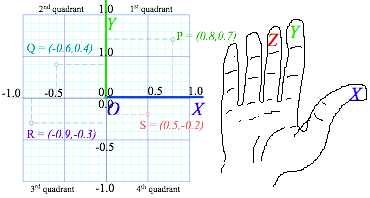
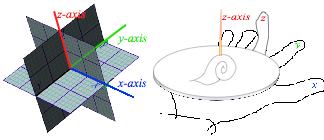
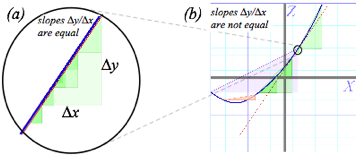
Fig. 1.4b has eight different but similar triangles with the same angles (ó,ð/2,óc) as the triangle in Fig. 1.4a. Can you spot them? Whether big or small, similar triangles share ratios (sine, cosine, or tangent) if (and only if) they share angles. To do geometry problems we look for “hidden” similar triangles and hidden right triangles that form similar rectangles. Right triangles have relation a2+b2=r2 of Pythagoras (~570 BC).
One secret is to visualize sequences of scale change or rotation transformation as in Fig. 1.5 where each rectangle is rotated by 90° and shrunk by a factor cotó=64.2%. Rectangle diagonals in Fig. 1.5a (and sides in Fig. 1.5b) give a power sequence (…tan1ó,tan0ó=1,(tanó)-1=cot1ó,(tanó)-2=cot2ó,(tanó)-3=cot3ó,…).
A power sequence is also called a geometric sequence since it is suggested by geometry. A rectangle sequence in Fig. 1.5a is lined up with the XY coordinates of the page, that is, each side has zero or infinite slope but the first diagonal (tanó) has a negative slope angle of -óc = –1-radian or –57.3°. The sequence in Fig. 1.5b begins with a rectangle side (tanó) at angle –57.3°. Each sequential rotation in either figure is 90° clockwise around the original tangent point with rectangle size shrunk by factor cotó=64.21% each time.

Fig. 1.5 Geometric cotó=0.6241 sequences of whirling rectangle segments based on slope angle ó=1.
Exercises for study of slope and trigonometry
1. Construct whirling square diagrams for 60° slope angle ó=ð/3 without using protractor. First compare the precision of graph-derived values of sinó, cosó, tanó , etc. with algebraic and/or calculator-derived numbers.
Only certain angles have exact Euclid rule&compass construction and ó=60° is one of them. (But, ó=1 isn’t!) If you could “straighten” the (l=1)-arc of a (ó=1)-sector (Fig. 1.3a) to one (r=1)-side of an equilateral triangle, its slope angle would grow from ó=1=57.3° to ó=π/3=60° as shown in Fig. 1.6b.
To construct a 60° slope a′ la Euclid, draw a radius-(r=1) circle by compass and use the same radius-r setting to strike an arc from X point-(x=1,y=0) to locate R as in Fig. 1.6b. So now, theoretically, arc-RX is l=π/3=1.0472…long approximately but line-RX has length-(r=1) exactly. At 2-figure precision both have length 1.0, but at 3-figure precision, arc-RX length is 1.05, 5% greater than line-RX length 1.00.
Whether a math or physics theory is “correct” or not depends on our level of precision. As we will see, it is pretty tough to get order-3 absolute precision (1 part in 1,000) with ruler and compass construction but order-2 is pretty easy. By taping fishing line onto arc-RX, we can see that it is about 5% shorter than a unit line, but measuring 4.7% is challenging and 4.72% requires tools most don’t have.
We easily get level-9 precision by poking sin(π/3) into a calculator (or sin60° if set for degrees) to get sin(π/3)=0.866025403…. but only can estimate 0.86 or 0.87 in Fig. 1.6b graph as indicated by ??? marks.
To construct the tangent declination by compliment angle óc= π/2-π/3= π/6 (or 90°-60°=30°) we strike a unit arc off the –Y point to intersection point Q on the 4th quadrant-YQX of unit circle in Fig. 1.6c. The line OQ thru point Q is perpendicular or normal to original slope line OR since óc+ó is π/2(90°) for any ó.
This line OQ drawn thru point R is the tangent decline we need for this problem. Just redo arc inter-sector -YQO to make sector NPR centered at R instead of O. Then draw tangent line PR so it extends down to secant point S on the X axis and up along the cotangent line to the cosecant point on the Y axis.
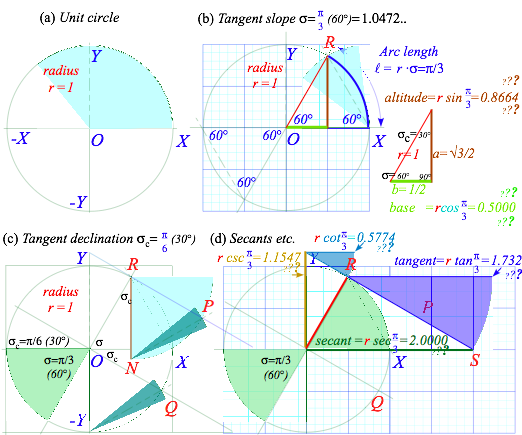
Fig. 1.6 Details of a geometric construction of Fig. 1.5 for slope angle ó=ð/3 (60°)
Segments
OS and YR provide numerical estimates of calculated values sec(π/3)=2.000 and csc(π/3) =1.155 along X
and Y axes,
respectively, in Fig. 1.6d. The value sec(π/3)=2
like its inverse
cos(π/3)=1/2 is exactly
rational, a nice feature of a (30°,60°,90°)-triangle
with side ratios (b:a:r)=(1:√3:2) (It is a right triangle, so: a2+b2=r2.) The “30-60” is a famous right triangle students
must learn. Others are “3-4-5” ((a:b:r)=(3:4:5)) and the “45” (
(45°,45°,90°)or(a:b:r)=(1:1:√2)). A “Golden” ratio ![]() triangle
is very cool (and rich).
triangle
is very cool (and rich).
So far we give an angle or unit-circle arc ó and construct or calculate trigonometric functions of ó including a=sin ó, b=cos ó, t=tan ó, 1/a=csc ó or their co-functions. Now consider the reverse or inverse case: we are given a, or b, or t etc. and must come up with an arc ó (or arcs ó1, ó2...) that gives a, etc. To do this we find arc-functions arc-sine, arc-cosine… or inverse trig functions sin-1, cos-1…as follows.
ó =arcsin(a)=sin-1(a), ó =arccos(b)=cos-1(b), ó =arctan(t)=tan-1(t),…
The exponential (-1)-notation seems to confuse sin-1(a) with (sin(a))-1=1/(sin(a)) that we do not want here. (However, it is conventional to write (sin(a))n=sinn(a) or any power but (-1).)
Algebra of arc-functions is trickier than algebra of functions themselves. Geometric constructions of sin-1, cos-1…etc. are not so tricky but quite simple and revealing. To find sin-1(0.5), for example, we draw a horizontal line at y=0.5 and see where it intersects the unit circle. (Fig. 7a) Nothing to that! Except, we see there are two angles ó1=π/3 and ó2=2π/3 that give sinó1=0.5=sinó2. The same applies to cos-1(0.5) except now the angles are ±π/3. (Fig. 1.7b) Note the antipodal (±180°) angles that equal tan-1(0.5). (Fig. 1.7c)
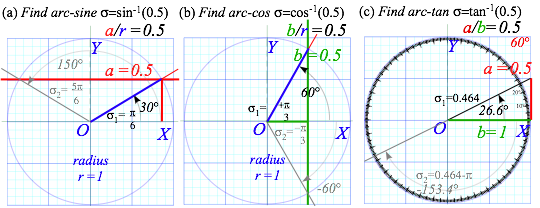
Fig.
1.7 Geometric construction of arc-trig functions of 0.5=![]() . (a) sin-1(
. (a) sin-1(![]() ) (b) cos-1(
) (b) cos-1(![]() ) (c) tan-1(
) (c) tan-1(![]() )
)
2. Find arc-secant (say, sec-13.0) by geometry. Try it first without looking at the answer.
Solution Hints:
We need to find the tangent that goes from 3.0 to touch the circle. A circle of radius r=3.0 concentric to the unit circle has rectangle tangents of that size that we copy from x=3.0 to touch unit circle.
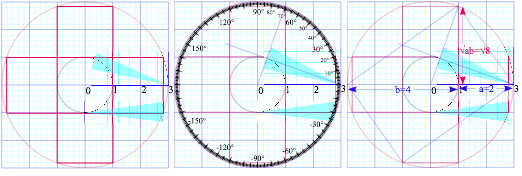
Fig. 1.8 Geometric construction of arc tangent, arc secant, and geometric-mean square-root.
Or else we simply draw rectangle diagonal thru unit circle. This involves Thales’s Geometric Mean (GM) construction in Fig. 1.9a of a product square root √(a·b). In Fig. 1.8 it is √8=2.82… the desired tangent. The special case of the Golden Mean is shown in Fig. 1.9b. The whirling rectangle in Fig. 1.5 is a whirling square in Fig. 1.10 if the rectangle tangent and cotangent are Golden Means 1.618.. and 0.618.., respectively.
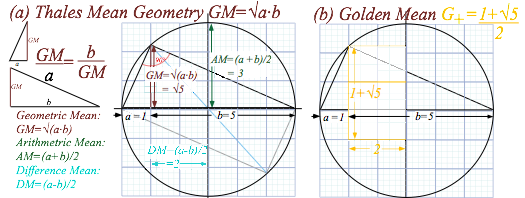
Fig. 1.9 Thales construction of geometric-mean, square-root, and Golden Mean.
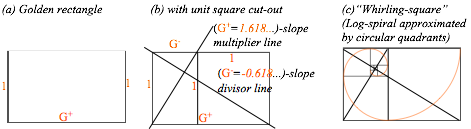
Fig.
1.10 (a) Golden Rectangle, (b) Golden slope geometry, and (c) Whirling Square
like Fig. 1.5.
Know your calculator and ATAN, too! (atan2(y,x))
So
the calculator plays it safe and gives the acute angle solution in the arc-range –90° and +90°,
that is ![]() .
The obtuse
angle solution is ignored
for ranges +90° to +180°
.
The obtuse
angle solution is ignored
for ranges +90° to +180° ![]() or
-90° and -180°
or
-90° and -180° ![]()
A
correct solution is the sure-fire atan2(y,x) function that requires you to give both the altitude a=y and the base b=x (with correct signs, of course) so it
knows which quadrant you’re in. The atan2,
built into calculators gives what is called the rect-to-polar coordinate
conversion often labeled by
a ![]() -button.
-button.
Plug
in x and y
and out comes ![]() and
and
![]() . The è is our ó.
. The è is our ó.
Trig function plotting exercises (And, how we trisect angles)
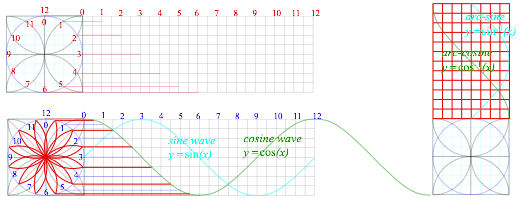
3. Use ruler&compass to plot y=cos(x) and y= cos-1(x)=arccos(x). Do y=sin(x) and y=sin-1(x). Begin by constructing a 12-pt “clock” circle. Repeat using 45° diagonals to make a 24-hr clock and project the 24 points horizontally for y=cos(x) and vertically y=cos-1(x)=arccos(x). Shift plot by 3 hours (90°) for sine and arc-sine functions. Each “hour” is angle 15° or π/6. Sine curves allow “forbidden” constructions such as cycloids and angle-n-sections. In quantum physics sinusoidal waves are really important curves!
Exercise 1.1.4
Construct both Golden angles associated with the Golden Ratios G+ and G- and measure their slopes in degrees on protractor graph paper below. (Also available online.) Can you find a simpler (Pythagorean) construction of √5 ?
Exercise 1.1.5
Construct whirling rectangle diagram like Fig. Fig. 1.5 but for Golden slope angle to give whirling square sketched in Fig. 1.10. Use protractor graph from Ex. 1.1.3 to measure angles of slopes obtained this way.